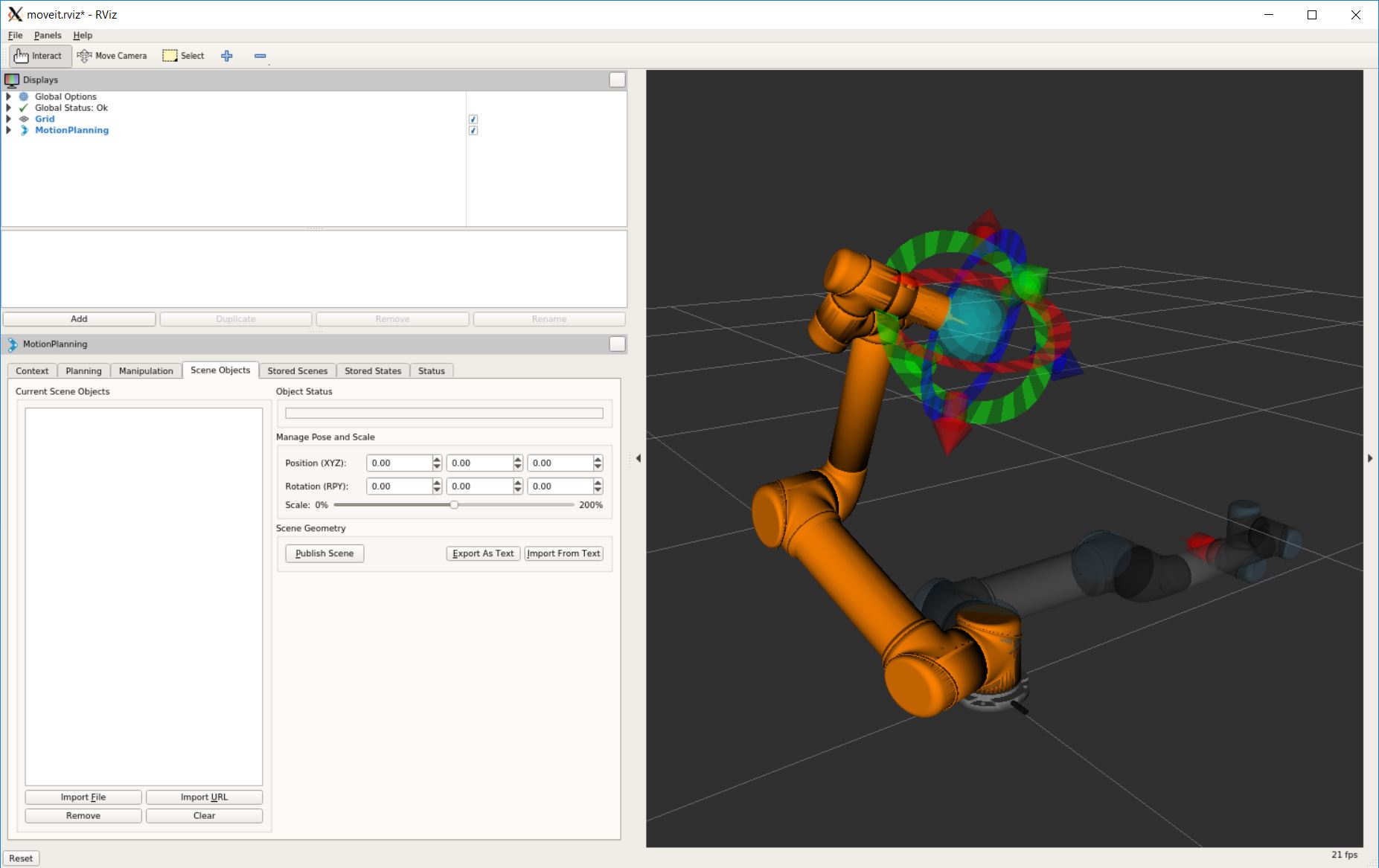
I’m following this tutorial and I should end up with the ur5 + tool visualized in RVIZ, where the robot is moved by the ‘tcp’: see this image
I followed all steps, and RVIZ is showing the ur5+tool, but the ‘ball’ is not at the tcp, but at the end of the ur5. now the robot won’t move around the tcp (but around the last link of the ur5).
What am I missing here?
I just tested with 1 planning group (with a chain from base_link → tcp) and no end-effector specified,
And then it will plan movement for the arm, including tool.
How to plan movement for the arm + tool with multiple planning groups?
And are others also having the problem that this tutorial is not correct?
I believe this is expected, if you select the right planning group, the interactive marker (the ball), will move to the end of the chain. By default, this rviz scene is probably using the main planning group of the UR which only goes up to the flange of the robot, but during the tutorial you defined a planning group that goes up to the tip of your tool.
Planning with multiple groups is easy, you’ll notice that all the compas_fab methods for planning take an optional group parameter, which is exactly for this purpose.
As you said, the interactive marker will be displayed on the end of the chain (of the active planning group).
But my kinematic chain is base_link → tcp, where tcp is the tool-tip. (this is the same as the tutorial).

{kind=link}